Hank
Existing handling robots are good at performing the same action, but they struggle with repeating actions that are slightly different each time.


The next generation handling robot will have the ability to sense touch, force and slip, emulating the human hand. As the design lead of Cambridge Consultant’s Boston Robotics initiative, my role was to create a vision for the Robotics demo and work with the technical leads to build proof of concepts.
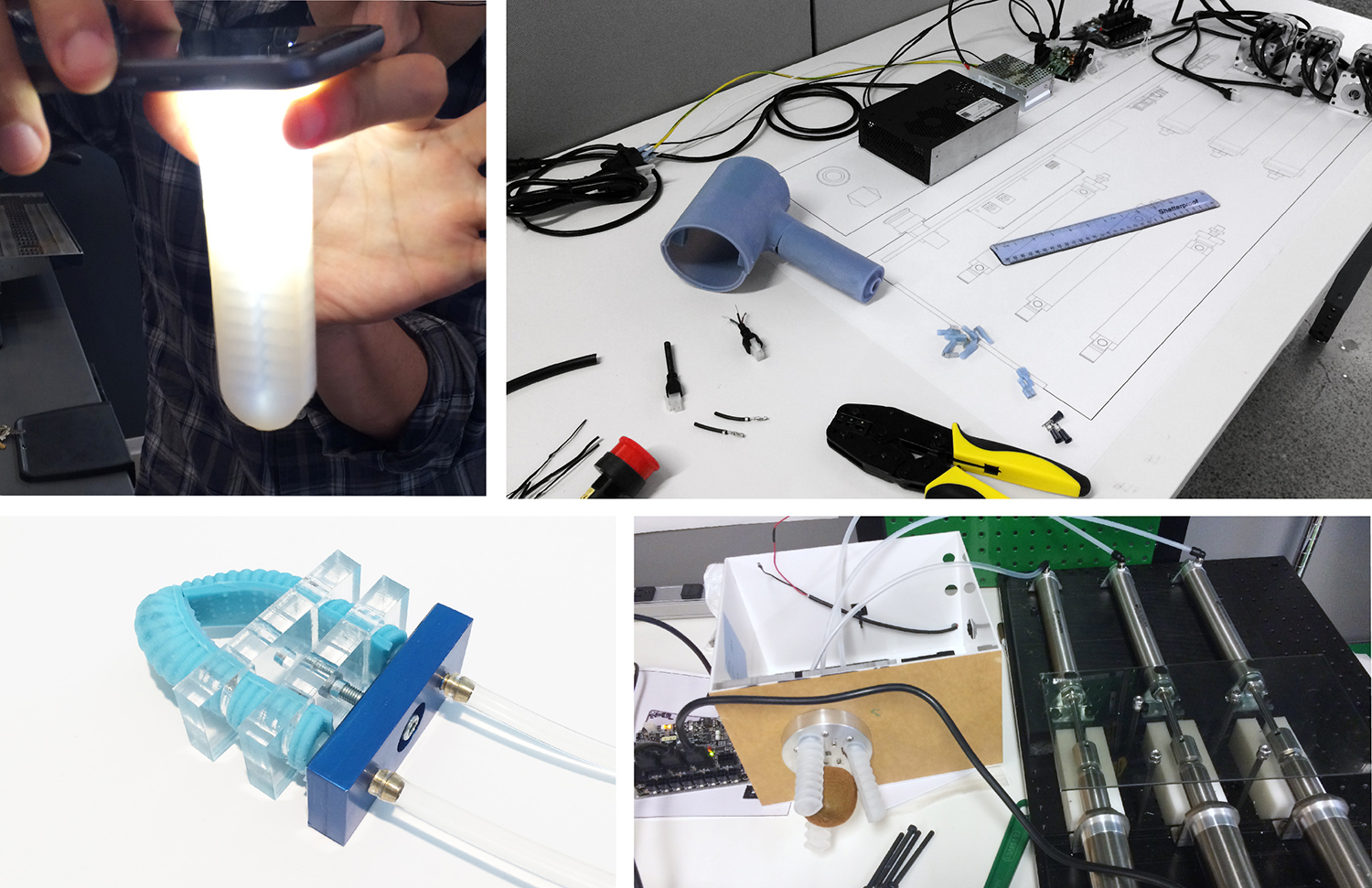

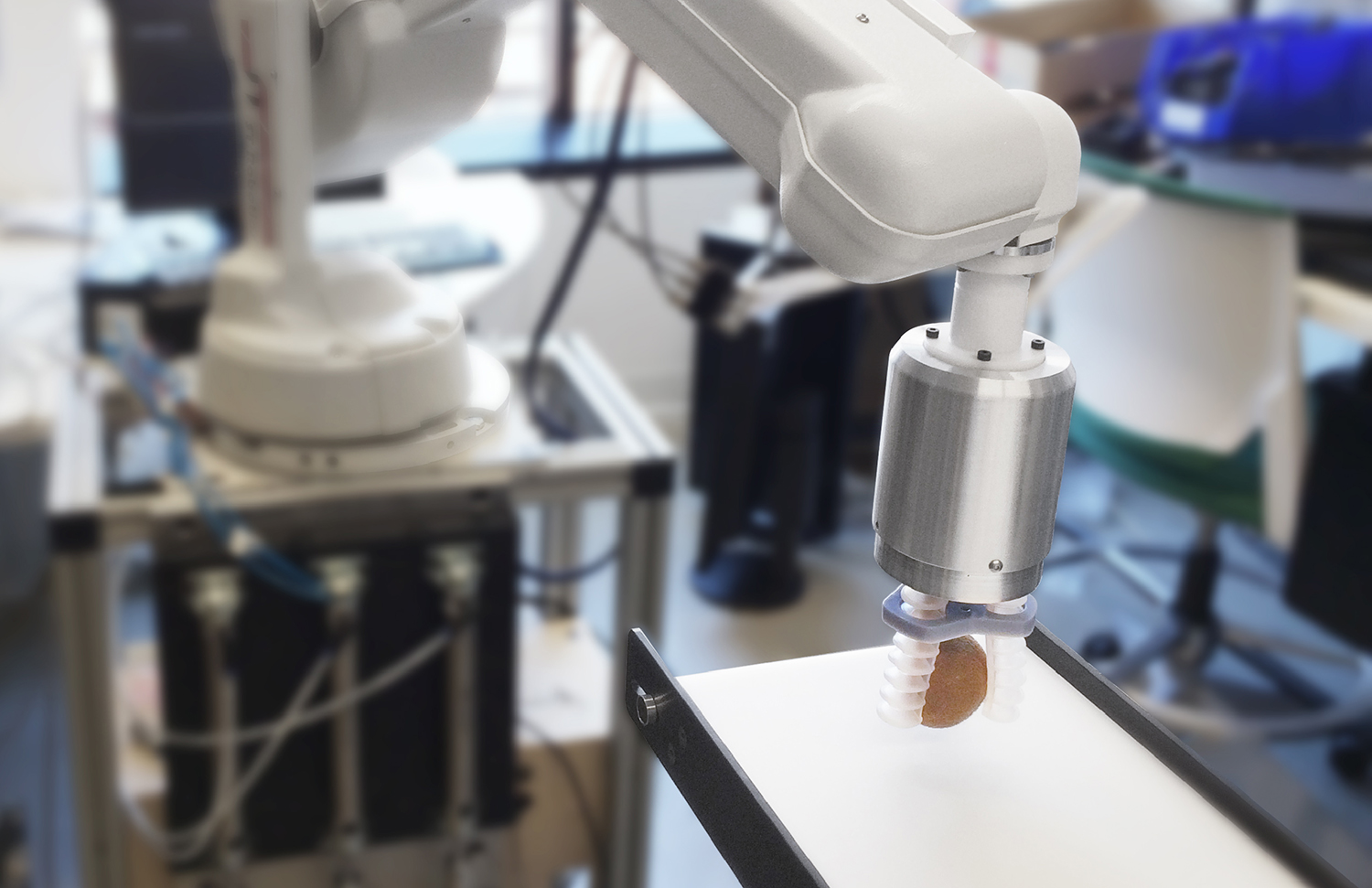
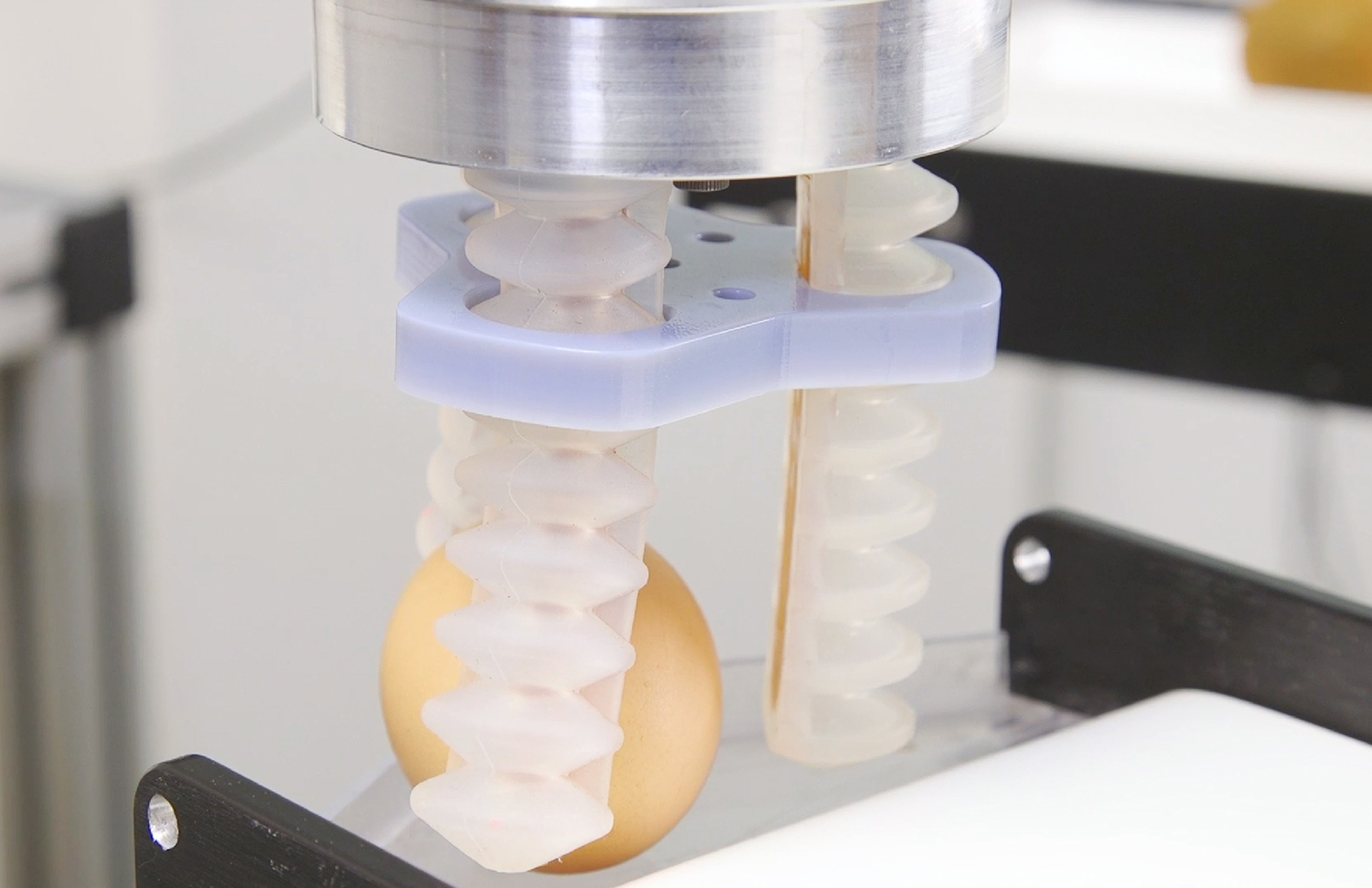
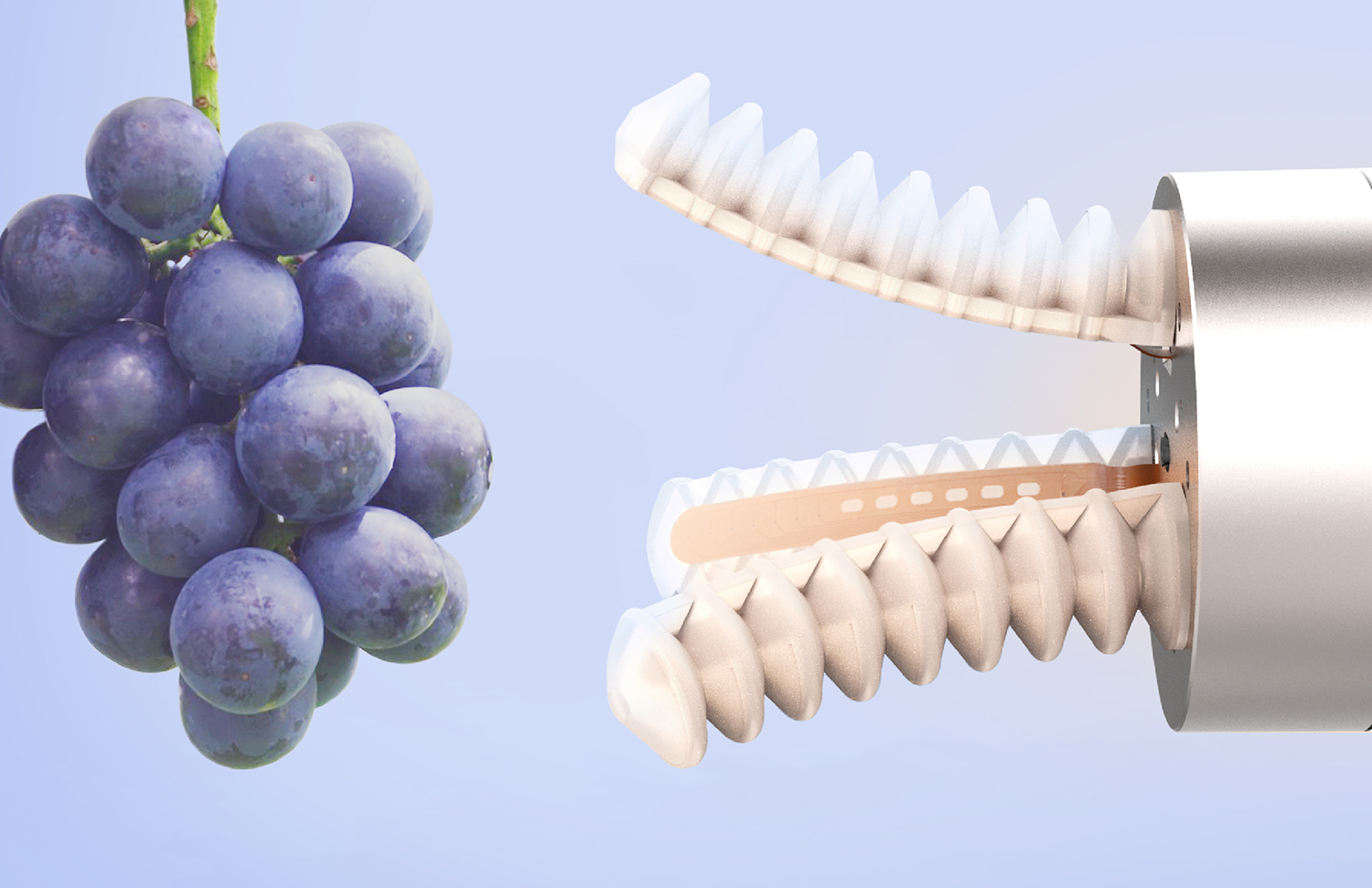
Hank’s grippers can individually expand and contract. Their multi-point sensors allow the end effector to handle delicate objects of various shapes by applying only the force necessary for an adequate grip.
Existing handling robots are good at performing the same action, but they struggle with repeating actions that are slightly different each time.
The next generation handling robot will have the ability to sense touch, force and slip, emulating the human hand. As the design lead of Cambridge Consultant’s Boston Robotics initiative, my role was to create a vision for the Robotics demo and work with the technical leads to build proof of concepts.
Hank’s grippers can individually expand and contract. Their multi-point sensors allow the end effector to handle delicate objects of various shapes by applying only the force necessary for an adequate grip.